|
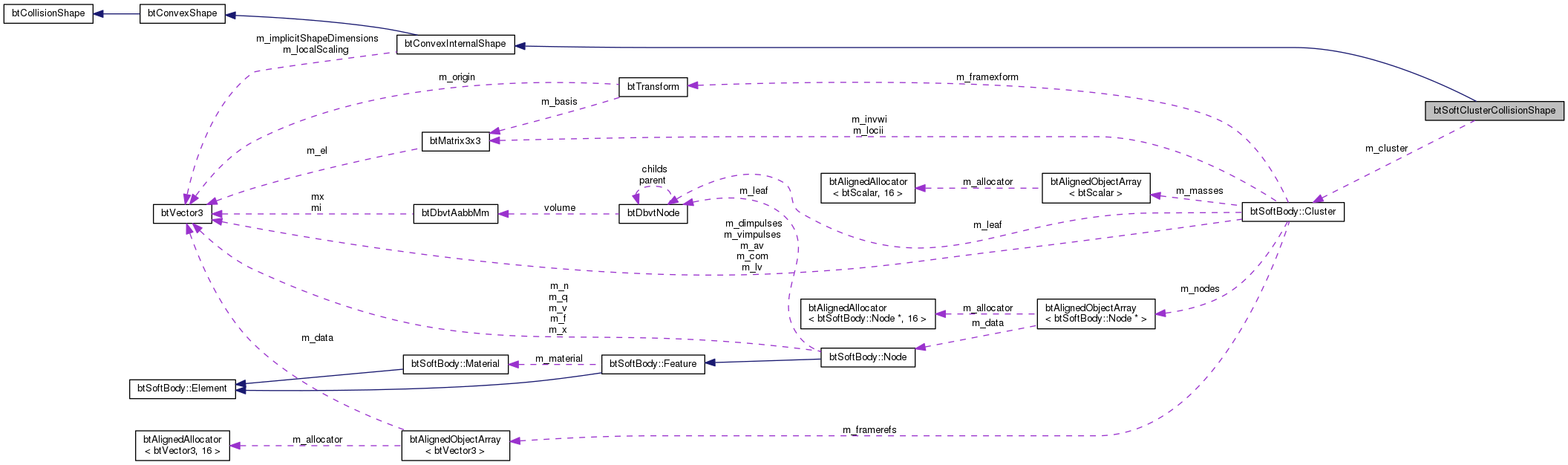
| | btSoftClusterCollisionShape (const btSoftBody::Cluster *cluster) |
| |
| virtual btVector3 | localGetSupportingVertex (const btVector3 &vec) const |
| |
| virtual btVector3 | localGetSupportingVertexWithoutMargin (const btVector3 &vec) const |
| |
| virtual void | batchedUnitVectorGetSupportingVertexWithoutMargin (const btVector3 *vectors, btVector3 *supportVerticesOut, int numVectors) const |
| |
| virtual void | calculateLocalInertia (btScalar mass, btVector3 &inertia) const |
| |
| virtual void | getAabb (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| | getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version More...
|
| |
| virtual int | getShapeType () const |
| |
| virtual const char * | getName () const |
| |
| virtual void | setMargin (btScalar margin) |
| |
| virtual btScalar | getMargin () const |
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| virtual | ~btConvexInternalShape () |
| |
| const btVector3 & | getImplicitShapeDimensions () const |
| |
| void | setImplicitShapeDimensions (const btVector3 &dimensions) |
| | warning: use setImplicitShapeDimensions with care changing a collision shape while the body is in the world is not recommended, it is best to remove the body from the world, then make the change, and re-add it alternatively flush the contact points, see documentation for 'cleanProxyFromPairs' More...
|
| |
| void | setSafeMargin (btScalar minDimension, btScalar defaultMarginMultiplier=0.1f) |
| |
| void | setSafeMargin (const btVector3 &halfExtents, btScalar defaultMarginMultiplier=0.1f) |
| |
| virtual void | getAabbSlow (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| |
| virtual void | setLocalScaling (const btVector3 &scaling) |
| |
| virtual const btVector3 & | getLocalScaling () const |
| |
| const btVector3 & | getLocalScalingNV () const |
| |
| btScalar | getMarginNV () const |
| |
| virtual int | getNumPreferredPenetrationDirections () const |
| |
| virtual void | getPreferredPenetrationDirection (int index, btVector3 &penetrationVector) const |
| |
| virtual int | calculateSerializeBufferSize () const |
| |
| virtual const char * | serialize (void *dataBuffer, btSerializer *serializer) const |
| | fills the dataBuffer and returns the struct name (and 0 on failure) More...
|
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btConvexShape () |
| | not supported on IBM SDK, until we fix the alignment of btVector3 More...
|
| |
| virtual | ~btConvexShape () |
| |
| btVector3 | localGetSupportVertexWithoutMarginNonVirtual (const btVector3 &vec) const |
| |
| btVector3 | localGetSupportVertexNonVirtual (const btVector3 &vec) const |
| |
| btScalar | getMarginNonVirtual () const |
| |
| void | getAabbNonVirtual (const btTransform &t, btVector3 &aabbMin, btVector3 &aabbMax) const |
| |
| virtual void | project (const btTransform &trans, const btVector3 &dir, btScalar &minProj, btScalar &maxProj, btVector3 &witnesPtMin, btVector3 &witnesPtMax) const |
| |
| | BT_DECLARE_ALIGNED_ALLOCATOR () |
| |
| | btCollisionShape () |
| |
| virtual | ~btCollisionShape () |
| |
| virtual void | getBoundingSphere (btVector3 ¢er, btScalar &radius) const |
| |
| virtual btScalar | getAngularMotionDisc () const |
| | getAngularMotionDisc returns the maximum radius needed for Conservative Advancement to handle time-of-impact with rotations. More...
|
| |
| virtual btScalar | getContactBreakingThreshold (btScalar defaultContactThresholdFactor) const |
| |
| void | calculateTemporalAabb (const btTransform &curTrans, const btVector3 &linvel, const btVector3 &angvel, btScalar timeStep, btVector3 &temporalAabbMin, btVector3 &temporalAabbMax) const |
| | calculateTemporalAabb calculates the enclosing aabb for the moving object over interval [0..timeStep) result is conservative More...
|
| |
| bool | isPolyhedral () const |
| |
| bool | isConvex2d () const |
| |
| bool | isConvex () const |
| |
| bool | isNonMoving () const |
| |
| bool | isConcave () const |
| |
| bool | isCompound () const |
| |
| bool | isSoftBody () const |
| |
| bool | isInfinite () const |
| | isInfinite is used to catch simulation error (aabb check) More...
|
| |
| int | getShapeType () const |
| |
| virtual btVector3 | getAnisotropicRollingFrictionDirection () const |
| | the getAnisotropicRollingFrictionDirection can be used in combination with setAnisotropicFriction See Bullet/Demos/RollingFrictionDemo for an example More...
|
| |
| void | setUserPointer (void *userPtr) |
| | optional user data pointer More...
|
| |
| void * | getUserPointer () const |
| |
| void | setUserIndex (int index) |
| |
| int | getUserIndex () const |
| |
| virtual void | serializeSingleShape (btSerializer *serializer) const |
| |
Definition at line 118 of file btSoftBodyInternals.h.
 Public Member Functions inherited from btConvexInternalShape
Public Member Functions inherited from btConvexInternalShape